
Description
Two motors, one CAN node on dual h-bridge motor driver
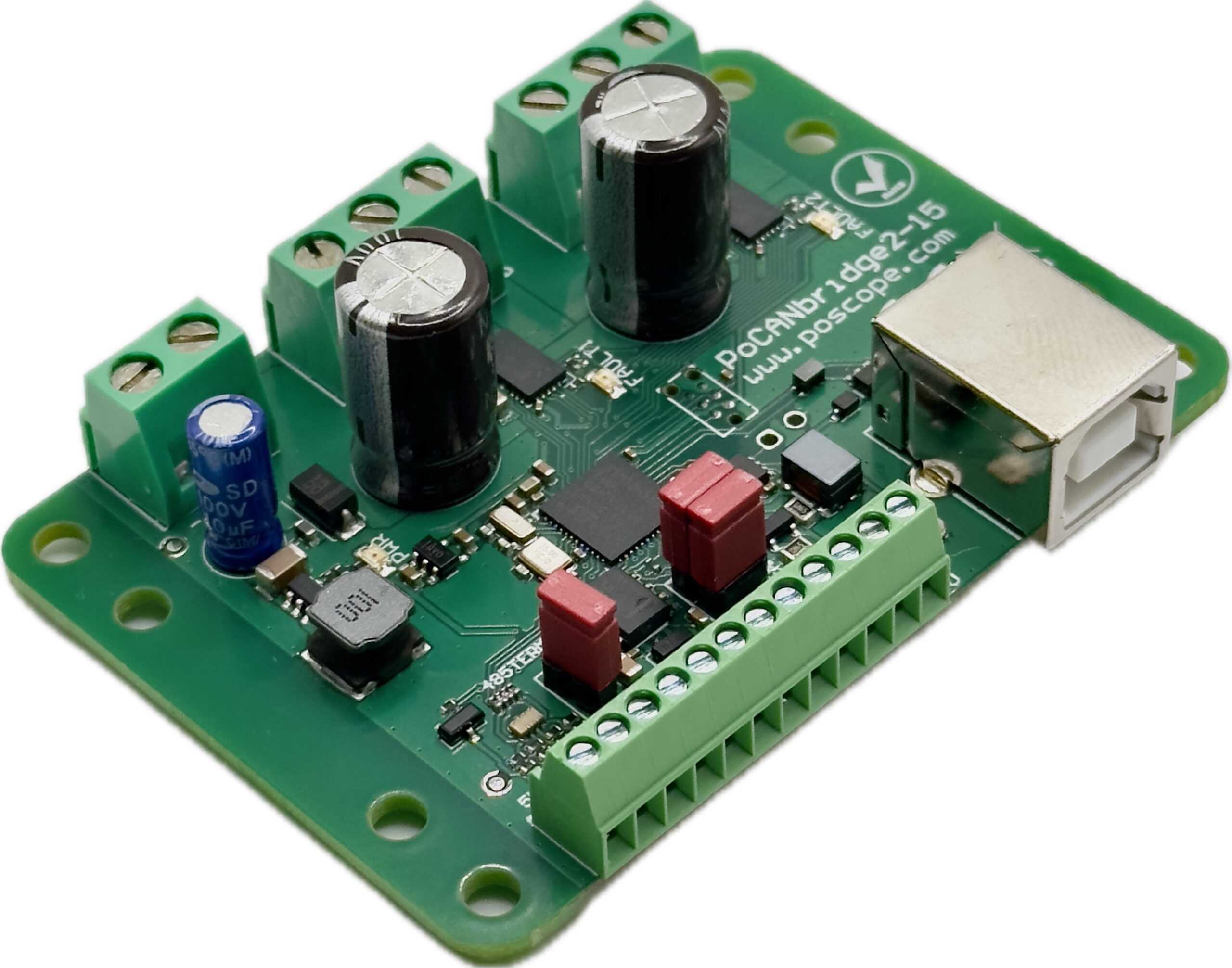
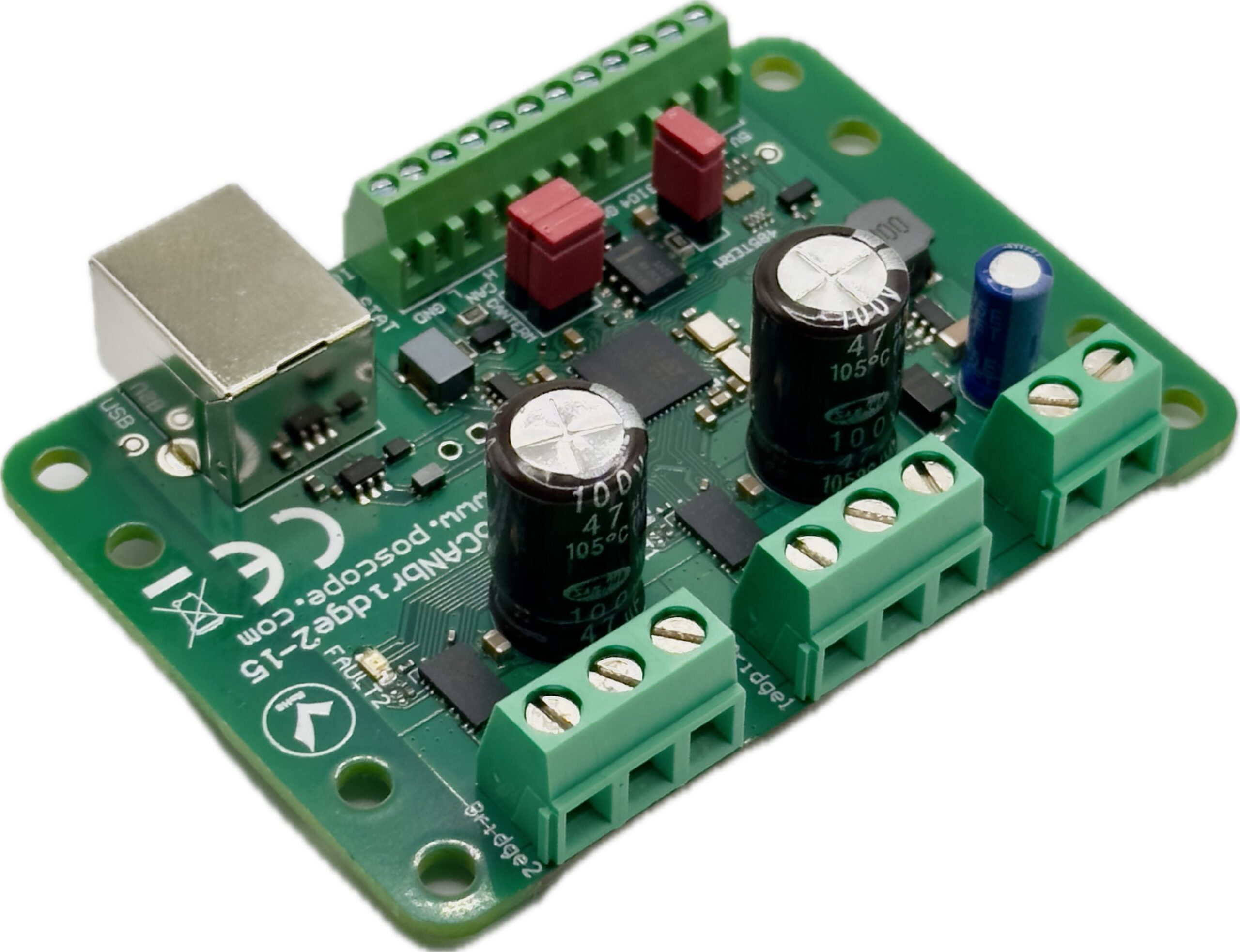
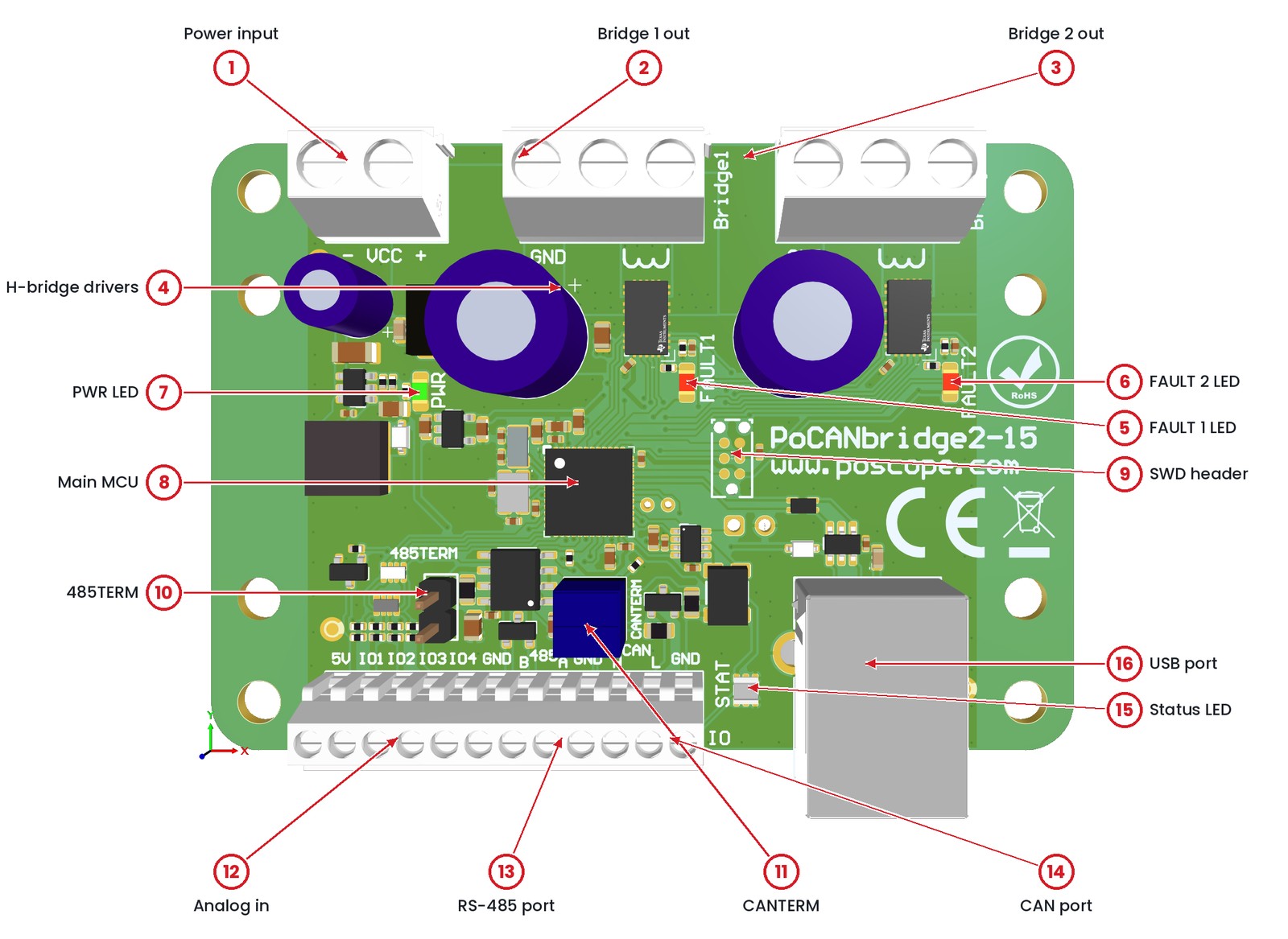
The PoCANbridge2-15 is a compact dual h bridge motor driver node. It controls two independent DC-motor channels with per-bridge PWM, live current monitoring and fault detection, and drops straight onto a CAN (PoCAN v2) or RS-485 (Modbus RTU) bus — so it can be coordinated by a PoKeys host or run entirely on its own.
Like the rest of the PoKeys devices, it is built for electrically noisy environments: on-board termination jumpers, robust fieldbus transceivers and a configurable host-loss fail-safe keep your machine predictable even when communication drops.
- Two independent H-bridge channels
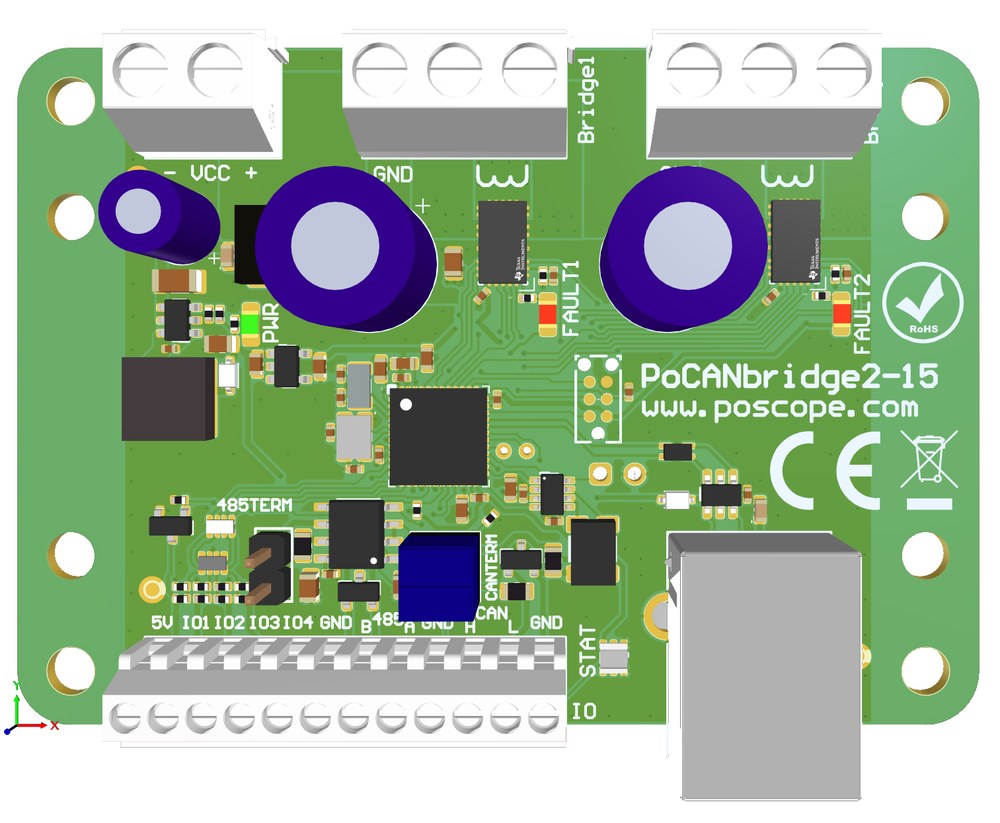
- 4 analog inputs · 1 digital output · RGB status LED
- Standalone logic with the PoLogic visual editor
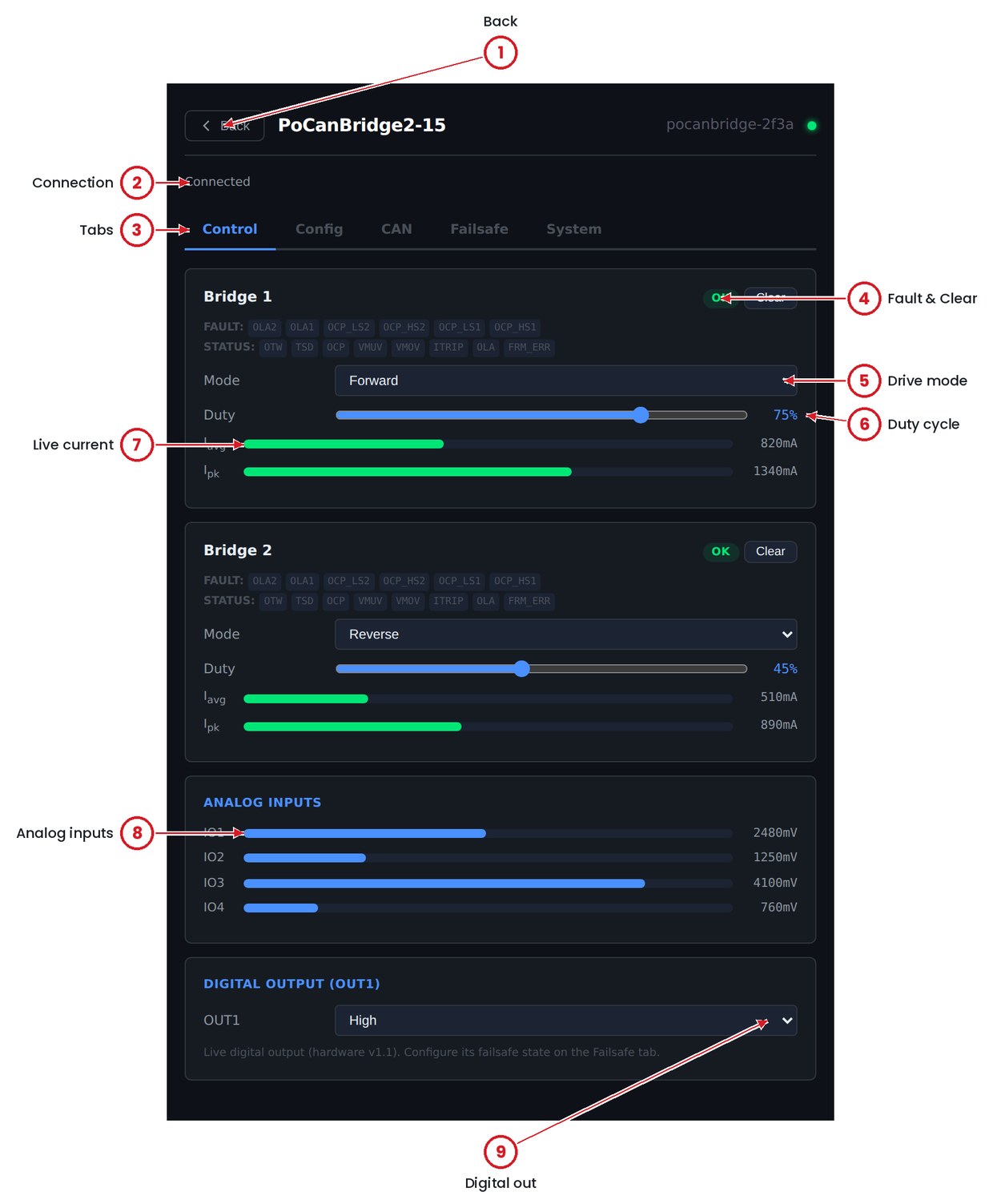
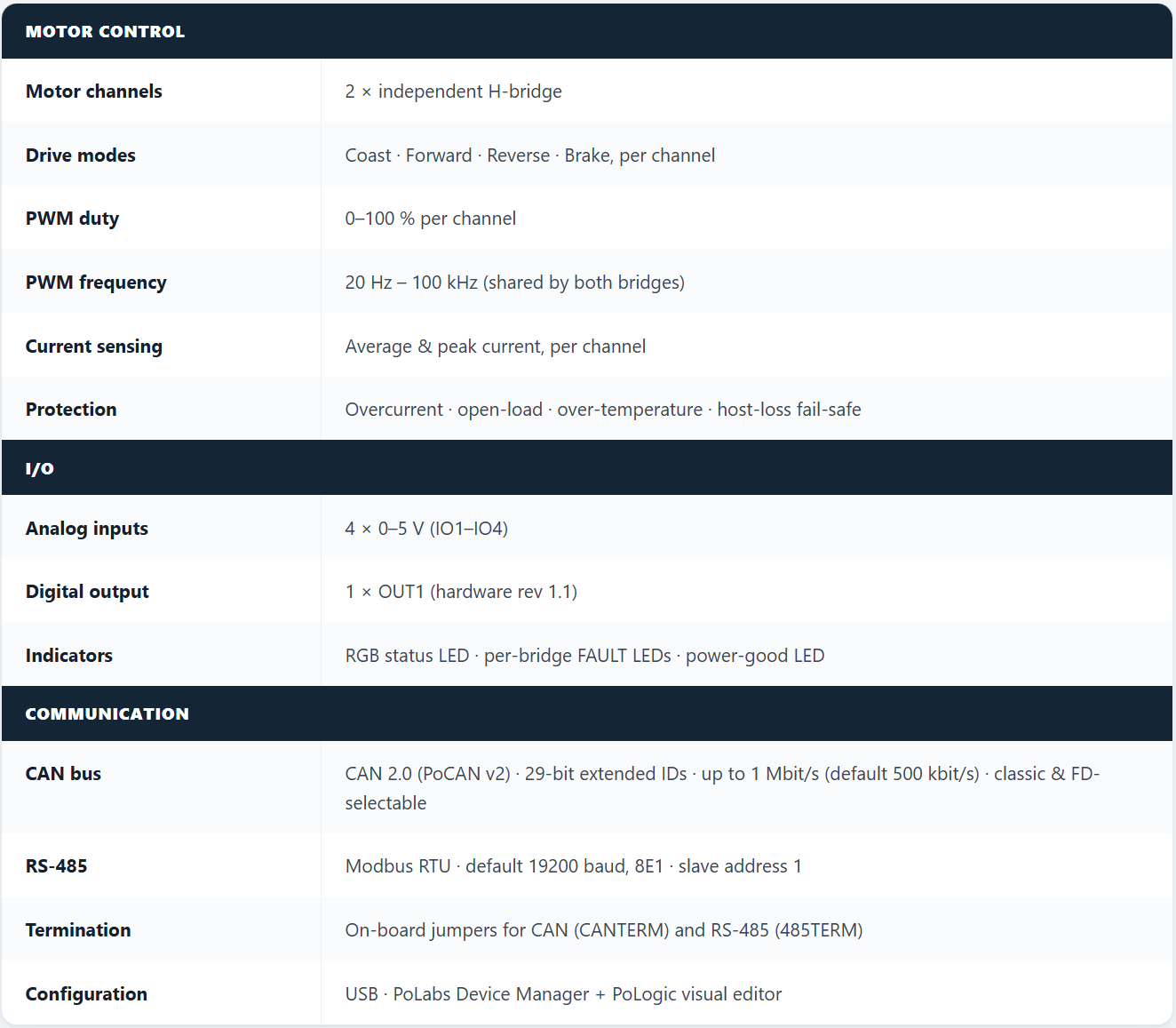
- Drive modes: Coast / Forward / Reverse / Brake
- Shared PWM frequency, 20 Hz – 100 kHz
- Average & peak current sensing per bridge
- Four 0–5 V analog inputs (IO1–IO4)
- One digital output (OUT1) and RGB status LED
- CAN 2.0 — PoCAN v2, 29-bit IDs, classic & FD-ready
- RS-485 — Modbus RTU, default 19200 8E1
- On-board CAN & RS-485 termination jumpers
- Host-loss fail-safe for both bridges and OUT1
- USB configuration via PoLabs Device Manager
- Four mounting holes; optional DIN-rail adapter

Reviews
There are no reviews yet.